Topiary models (Section 11)
present examples of plants subject to the influences of the environment.
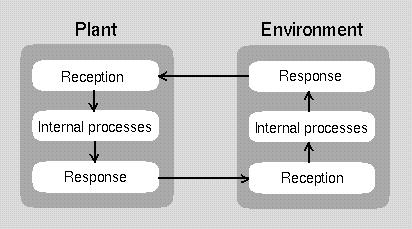
In nature, interactions between a plant and its environment have often a
more complicated character, with the environment affecting the plant and
the plant reciprocally affecting the environment. This bi-directional information
flow can be conceptualized as the feedback loop shown in
Plate 29.
Simulation of plants interacting with their environment
can be carried out within the general framework of open L-systems
[Mec1996]. The development
is assumed to take place in a space characterized by a scalar or vector
field. Modules of a growing plant can test values of this field at points
of interest, and send values that affect the field at specific locations.
Sample models constructed according to this scheme are shown below.
Animation 25
shows an L-system recreation of one of the earliest models of plant-like
branching structures, proposed in 1967 by Cohen [Coh1967].
The model is sensitive to the local density of the growing structure. The
gradient of the density function is used to select the least crowded areas
available for the further development of each branch. In very dense areas,
the growth stops altogether. In this way, the resulting geometry is determined
by interactions between the branches, mediated by the environment.
Animation 26
shows the development two planar branch tiers competing for space. The underlying
model, based on the observation of the tropical tree Terminalia catappa,
was proposed by Honda, Tomlinson, and Fisher [Hon1981].
The circles represent leaf clusters, located at the nodes. The endpoint
of each branch, or apex, produces new branches, unless they would fall into
an existing cluster. This interaction limits the extent of branching, and
adapts the shape of each tier to the presence of its neighbor.
Animation 27
shows the top
view of a ground area with different intensities of incoming light. A hypothetical
clonal plant inspired by clover propagates by means of horizontal stem segments
(spacers) which connect individual plants (ramets). Old
spacers and ramets die. The clone takes advantage of high light intensity
by increasing the frequency of branching and decreasing the length of the
spacers. Collisions are avoided as in the previous simulation. After colonizing
the most favorable bottom left patch, the plant reinvades the top right
patch. Light conditions in that patch are not sufficient to continuously
sustain the plant. The colony disappears until the patch is reached again
by a new wave of propagation. The dynamics of propagation reflects the plant's
adaptation to its environment.
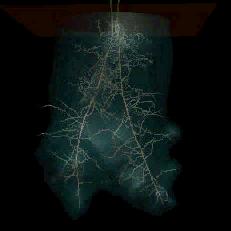
Animation 28
shows a two-dimensional model of a root seeking water in the soil during
its development. The initial water distribution has been predetermined,
forming an S-shaped zone of high concentration indicated by the light colour.
The growing tips of the main root and rootlets absorb water that diffuses
in the soil. The decreased water concentration is indicated by dark areas
that emerge around the root system. In areas with insufficient water concentration
the rootlets cease to grow before they have reached their potential full
length.
Animation 29
shows a three-dimensional extension of the previous model, based on the
work of Clausnitzer and Hopmans [Cla1994].
Water concentration is visualized by a semi-transparent iso-surface surrounding
the roots. As a result of competition for water, the main roots grow away
from each other. If the rootlets grow more slowly, the area of influence
of each root system is smaller, and the main roots grow closer to each other.
This effect is illustrated in
Plate 30.
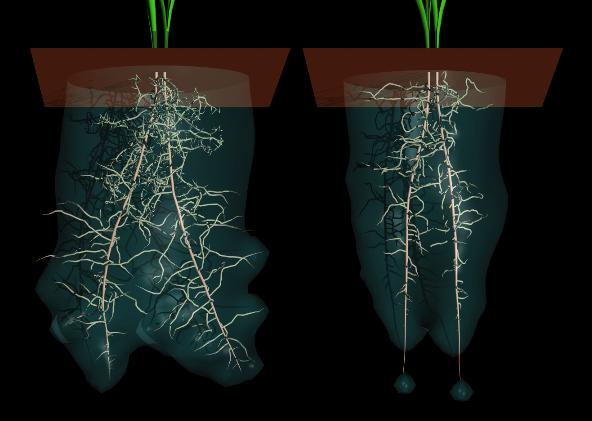
Plate 31
and
Plate 32
show a model of a horse chestnut tree inspired by the work of Chiba [Chi1994] and Takenaka
[Tak1994].


Here branches compete for light from the sky hemisphere.
Clusters of leaves cast shadows on branches further down. An apex in shade
does not produce new branches. An existing branch whose leaves do not receive
enough light dies and is shed from the tree. In such a manner, the competition
for light controls the density of branches in the tree crowns.
In
Animation 30,
two genetically
identical trees compete for light. Moving the trees apart after they have
grown reveals the adaptation of each crown to the presence of the neighbor
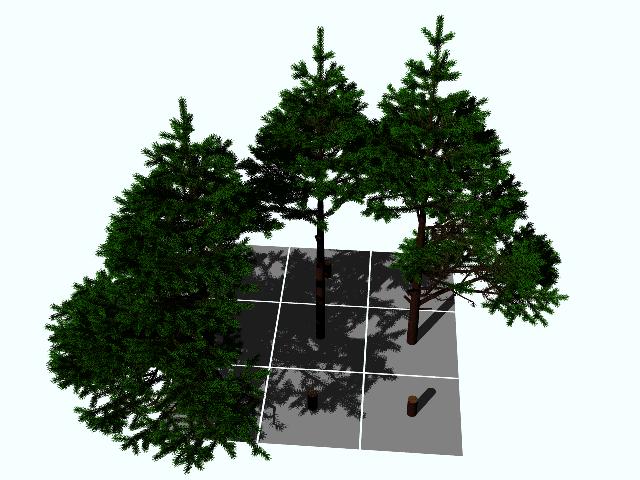
tree. A similar adaptation takes place in coniferous tree (
Plate 33,
and
Plate 34).

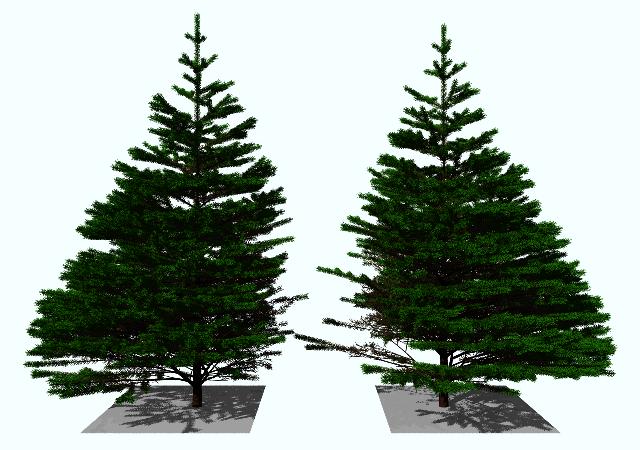
Plate 35
further illustrates
the impact of competition for light on tree growth. Trees on the border
of a stand have assymetrically developed crowns, and retain some of their
lower branches. The tree in the middle has lost its lower branches, which
did not receive enough light.
In the lumber industry, the loss of lower branches is usually
a desirable phenomenon, as it reduces knots in the wood and the amount of
cleaning that trees require before transport. Simulations may assist in
choosing an optimal distance for planting trees, where self-pruning is maximized,
yet there is sufficient space between trees to allow for unimpeded growth
of trunks in height and diameter. |